1。实验目的
加深学生对平面机制的组成原理和结构组成的理解,并了解平面机制的组成和运动特征;
培养学生的全面组织设计能力,创新能力和实践动手能力。
2。实验设备和工具
ZBS-C组织体育创新设计计划实验室台(请参阅“ ZBS-C组织体育创新设计计划实验室台组件列表”)
1)齿轮:模量2,压力角20°,牙齿编号为28、35、42、56,中心距离组合为:63、70、77、77、84、91、98;
2)凸轮:基本圆的半径为20mm,举重型,而跟随的行程为30mm;
3)机架:模量2,压力角20°,单个机架的总长度为400mm;
4)凹槽轮:4个凹槽轮;
5)拨号:它可以形成两个针拨盘或单针拨盘;
6)活跃的轴:轴端具有平钥匙,有两种结构类型:圆头和平头(可以形成旋转或移动的一对);
7)驱动的轴:轴端没有平坦的钥匙,并且有两种结构类型:圆头和平头(可以形成旋转对或一对移动对);
8)移动子:轴端具有平坦的头部结构(可以形成移动子);
9)旋转反机(或滑块):用于形成旋转对或移动对的两个组件;
10)复合铰链I(或滑块):用于三个组件形成复合旋转对或形成旋转对 +一个移动对;
11)复合铰链II:用于形成四个组件的复合旋转对;
12)主动滑块插件:插入活跃的滑块座孔中,以使主动运动往复式线性运动;
13)主动滑块座:安装在线性电动机的机架轴上,形成往复式线性运动;
14)可移动铰链座ⅰ:用于在滑块导杆(或连杆)和连杆杆的任何位置形成旋转移动对;
15)可移动铰链座II:用于在滑块导杆(或连杆)和连杆杆的任何位置形成旋转或移动对;
16)滑块导杆(或连杆);
17)连接杆I:有六种长度不同的连接杆;
18)连接杆II:它可以形成带有三对旋转对的连接杆;
19)按下螺栓:规格M5,拧紧连杆和旋转的反轴,没有相对旋转,没有轴向运动;
20)使用间隔螺栓:规格M5,可防止连杆和旋转副轴之间的轴向分离,连接杆和旋转式轴可以相对于彼此旋转;
21)级别极限套筒:定义平面移动构件之间不同级别之间的距离,以防止移动成员之间的干扰;
22)拧紧垫圈:限制轴的旋转;
23)高次级锁定弹簧:确保凸轮和驱动成员之间的高次级接触;
24)机架防护罩:确保齿轮和机架之间的正确网格;

25)t-nut
26)冲程开关颠簸
27)倒车:当主动构件旋转机构时,用于移动传输;
28)张力轮:用于张紧带;
29)张力轮支撑杆:调整张力轮的位置以张力或放松皮带;
30)张力轮轴销:安装张力轮;
31、32、33)螺栓:专门制造,用于在连杆的任何位置拧紧可移动的铰链座i;
34)线性电动机:10㎜/s,配备线性电机控制器。根据活动滑块移动的距离,调整两个冲程开关的相对位置以调节机架或滑块的往复式距离,但调节距离不得大于400㎜;注意:在移动机理剪接之前,应首先检查卒中开关的相对位置和安装在主动滑块座椅上的中风开关,以确保可以正确实现往复运动并防止机器零件损坏;
35)旋转电动机:10r/min,电动机的安装位置可以沿着框架上的细长孔更换;
36)测试台架
37)标准零件和几个紧固件(A型扁平钥匙,螺栓,螺母,拧紧螺钉等);
2。组装和拆卸工具:单状驾驶员,跨驾驶员,哑扳手,艾伦扳手,钢板标尺,胶带尺寸。
3。您需要带上自己的笔和纸进行实验。
3。实验原理,方法和步骤
实验原理
任何平面机制均由连接到主要成员和框架的几个基本杆组(ASUL杆组)组成。
实验方法和步骤
1)掌握平面机制的组成原理;
2)熟悉本实验中的实验设备,每个部分,组件以及安装和拆卸工具的功能;
3)形成剪接实验内容的自准备平面机制运动方案;
4)将自设计的平面运动计划正确分为基本的杆组(即Asul Rod组);
正确拼接每个基本杆组;
5)将基本杆基团连接到运动传输顺序的主要部分和框架。
4。杆组的概念,基本杆组的分离和组装
杆组概念
该机制的条件是其引物的数量应等于其具有的自由度数量。因此,该机制可以分为零自由度的框架,底漆和组件组。具有零自由度的组件组也可以分为具有零自由度的更简单组成组。我们将最简单的组件组称为零自由度,最终无法拆卸在基本极组(或ASUL POL组)中,该组缩写为极组。
由杆组定义,构成平面机制的基本杆组应符合条件:
其中:n是杆组中的组件数量; PL是杆组中低对的数量; pH是杆组中的高度对数。由于组件的数量和运动对的数量应为整数,当n,pl和pH值不同时,可以获得各种基本杆基团。
1)高次级杆组
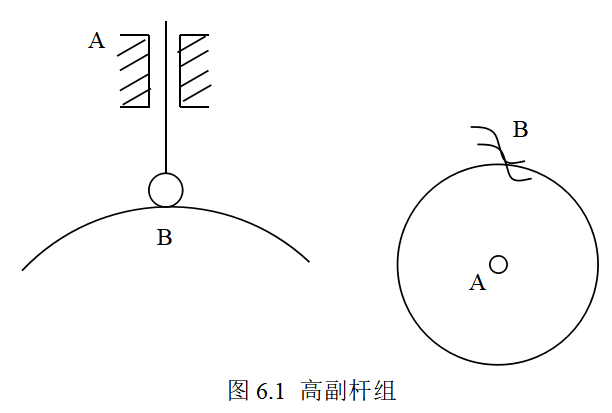
2)低次级杆套
当pH = 0时,杆组中的所有运动对都是低对,称为低对。因为有
所以
因此,n应该是2的倍数,而PL应该是3的倍数,即n = 2,4,6…,pl = 3,6,9…。当n = 2和PL = 3时,基本杆组称为II级组。 ⅱ类组是使用最广泛的基本杆组。大多数机制由ⅱ类杆组组成。 ⅱ类杆基可以具有图6.2所示的五种不同类型:

图6.2平面低次级II组
N = 4和PL = 6处的基本杆组被特异性称为III级组。公共级III组如图6.3所示:
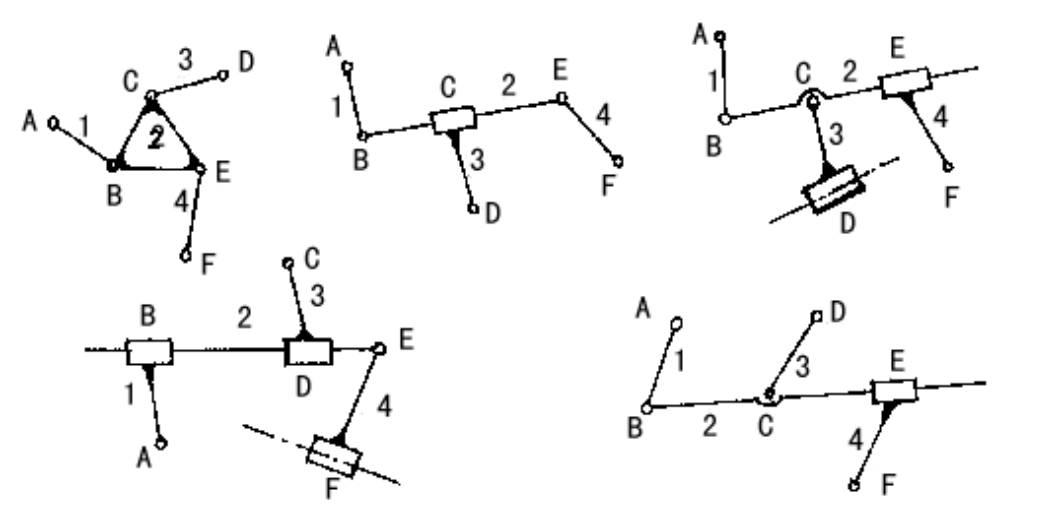
图6.3平面低级III组
从上面的分析可以看出,可以通过将杆组的自由度与框架和底漆依次连接到零自由度的杆组来形成任何平面机制。因此,上述机制的组成原理是该机制创新设计和组装的基本原理。
2。杆组正确分裂
应遵循以下步骤,以正确分配杆组:
1)正确计算机制的自由度(请注意,您可以消除机制中的虚拟约束和局部自由度),并确定底漆。
2)开始将杆套件从组件中拆卸到主要成员。首先尝试拆卸II组。如果II组无法分解,请尝试拆卸III组。也就是说,杆组的拆分应从下层杆组的拆分开始,然后依次分为高级杆组。
确定正确分裂的标准:每个极点拆分后,左侧部分仍应是具有与原始机制相同的自由度的机制,直到除去所有极点,并且仅剩下主零件和框架。
3)确定机制的水平(取决于被拆分的最高水平杆组。如果最高水平是II级组,则该机制是II级机制)。
注意:相同机制采取的主要部分是不同的,并且可能成为不同级别的机制。但是,当确定机制的主要成员时,拆卸杆基团的方法是独一无二的,即该机理的水平是确定的。
如果该机制含有高侧,为了进行研究便利,则可以根据某些条件将机理的高侧用低侧代替,然后将杆组分开。
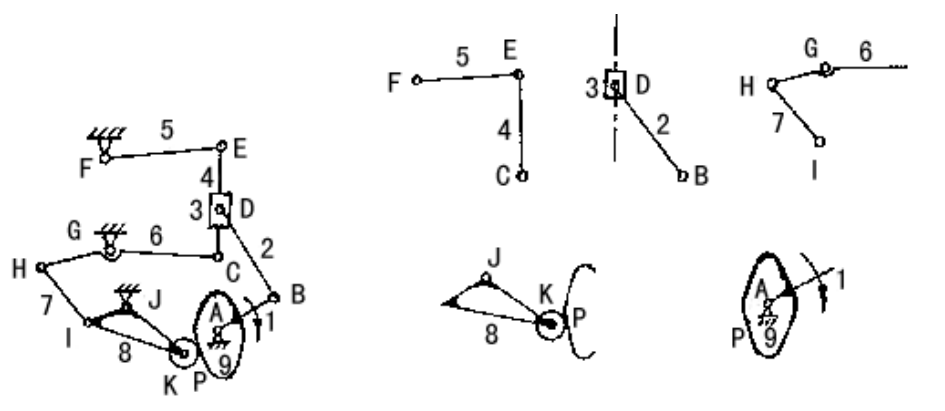

图6.4杆组拆分的示例图(锯机机构)
如图所示,首先要删除K处的局部自由度,并计算机制的自由度:
还将凸轮(固定连接到杆1)作为主要成员;根据步骤2的分裂原理,首先将由杆4、5、2、3、6和7组成的三个II级杆组分开,然后将单个组分高的高次级杆组分开,由杆8组成,最后剩下主成员1和帧9。上面的机制是II级机制。
3。杆组的正确组装
根据机理运动的预先准备的示意图,机理运动创新设计计划的实验台所提供的部分是按机构运动传输顺序组装而成的。组装时,通常从主要部分开始,然后根据运动传输定律组装。组装时,有必要确保每个组件彼此平行地移动平面,以避免在每个移动构件之间进行干扰,并确保每个组件的运动平面垂直于轴的轴。组件应从框架的垂直表面从内部到外部组装为参考平面。
注意:为了避免连杆之间移动平面之间的过度摩擦或运动干扰,应在组装过程中相应地安装水平极限套筒。
下图显示了由机构体育创新设计实验台提供的样式剪接方法。
1)测试台架
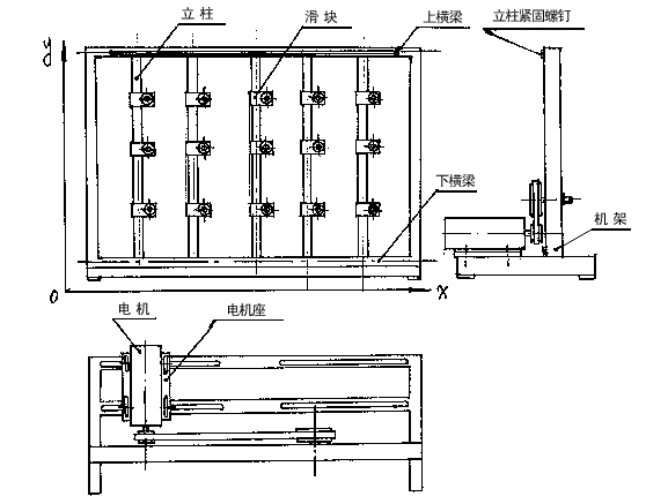
图6.5测试台架图
测试工作台的框架中有5个铅柱,所有这些都可以沿X方向移动。移动之前,请松开安装在电机侧的上下梁上的圆柱拧紧螺钉,并用双手将圆柱移至所需的位置,应将圆柱拧紧到上部(或下)横梁,然后将圆柱拧紧(当圆柱拧紧螺丝时)(当圆柱和光束未拧紧到螺钉上时,螺丝螺丝均不到螺钉,将在x方向上偏移圆柱)。
注意:柱固定螺钉只需要松开,不允许拧下。
列上的滑块可以沿列的y方向移动。要移动圆柱上的滑块,只需松开六边形的平头拧紧螺钉(拧紧螺钉就靠近运动侧)。
通过根据上述方法移动列和滑块,可以在框架的X和Y平面中确定固定铰链的位置。
2)主轴和框架之间的连接(下图中的零件编号与“机械运动创新设计计划组件列表”相同,而后面描述的图形相同)
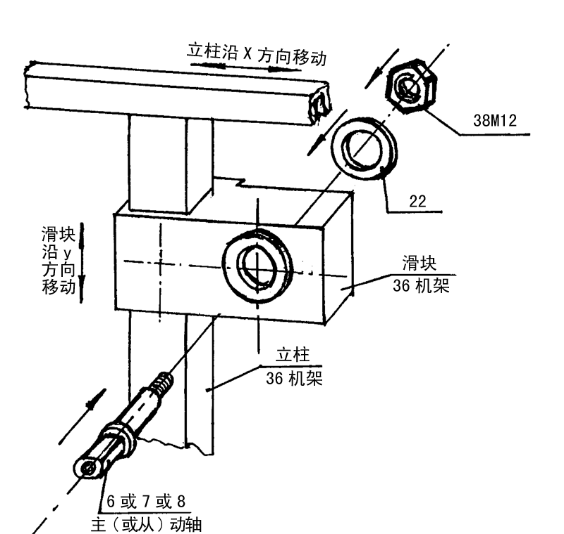
图6.6主轴和框架之间的连接
根据上图连接轴后,主(或从属)驱动轴无法相对于框架旋转,并与框架牢固地结合;如果未组装22件,则主要(或从属)驱动轴可以相对于框架旋转。
3)旋转对的连接
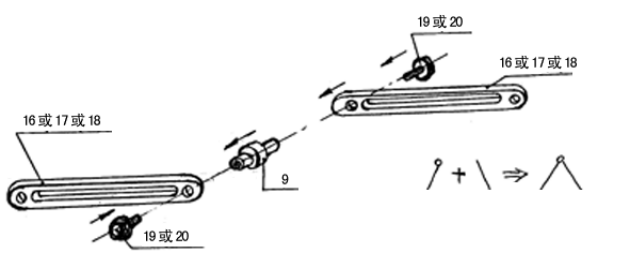
图6.7旋转次级连接图
如图所示,连接连接后,连接端连接杆和耦合端连接杆的成员9均未相对移动,并且连接端连接杆和耦合端连接杆的成员9相对于彼此旋转,从而形成两个连接杆的相对旋转运动。
4)移动对的连接
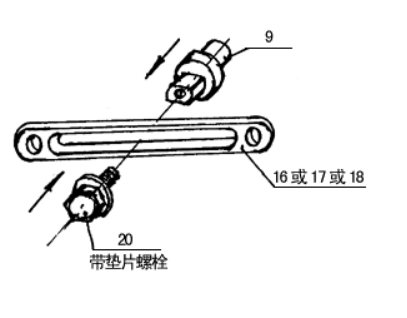
图6.8移动子连接图
5)安装可移动铰链底座i
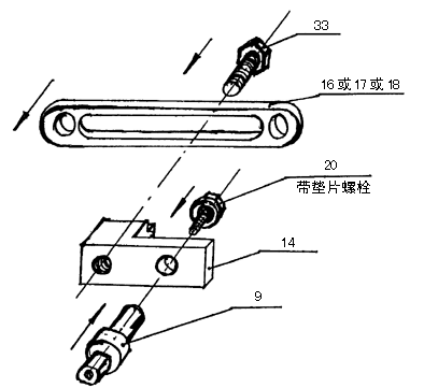
图6.9可移动铰链座的连接图ⅰ
如图所示,可以在连杆的任何位置形成铰链,并且第9部分可以如图所示组装,并且可以在铰链座I上形成旋转对或旋转旋转对。
6)安装可移动铰链底座II
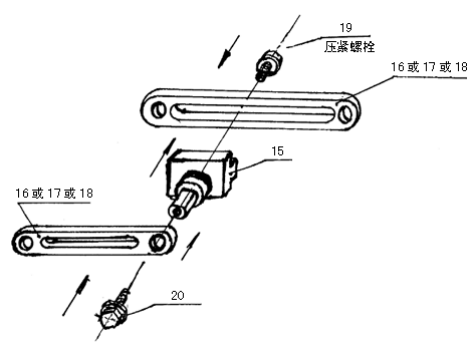
图6.10可移动铰链底座的连接图II
如图所示,可以在连杆的任何位置形成铰链以形成旋转对。
7)安装复合铰链I(或旋转摩托对)

图6.11复合铰链i的连接图
当将复合铰链i的铣削端插入连杆的长凹槽中时,形成了一对,并且耦合螺栓都配备了垫圈螺栓。
8)复合铰链II的安装
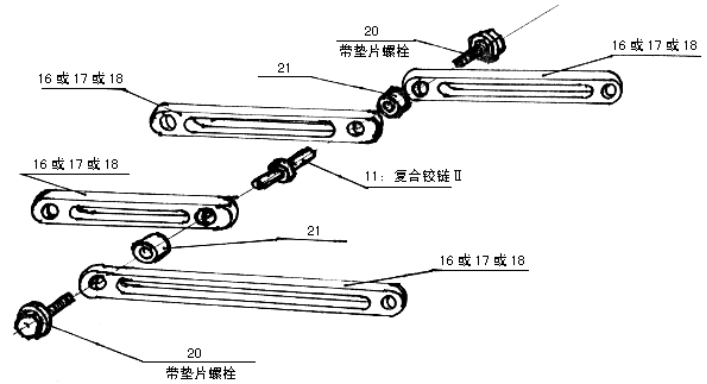
图6.12复合铰链II的连接图
连接复合铰链I后,它可以形成由三个组件组成的复合铰链,也可以形成复合铰链 +一个移动对。
连接复合铰链II后,它可以形成由四个组件组成的复合铰链。
9)齿轮和主(从属)驱动轴的连接图
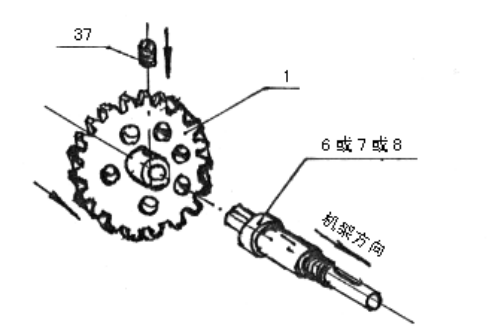
图6.13齿轮和主(从属)驱动轴的连接图
10)CAM和Master(从属)驱动轴的连接图
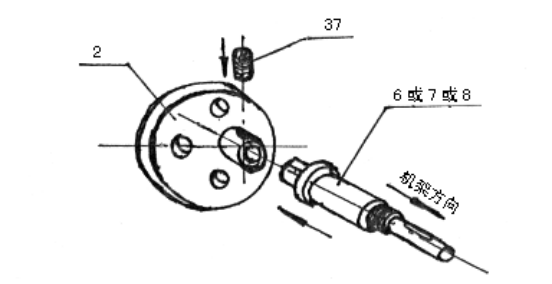
图6.14凸轮和主(从属)驱动轴的连接图
11)凸轮对连接图
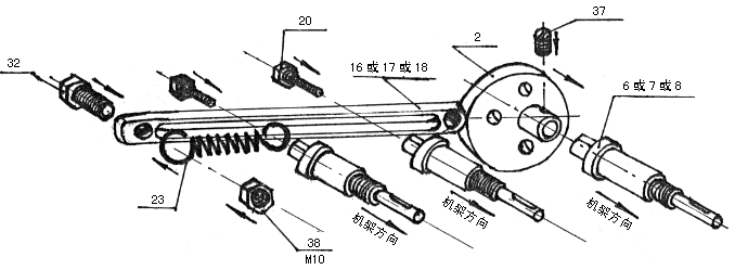
图6.15凸轮对连接图
如图所示,连接后,连接杆和主(从属)驱动轴可以相对移动,并且高对之间的接触在弹簧23中保持了。
12)凹槽车轮机构的连接
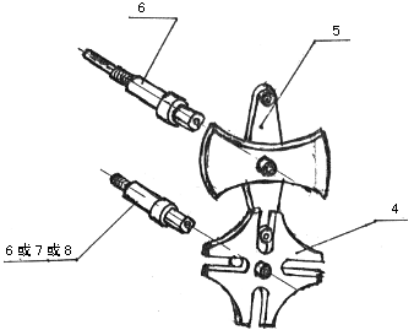
图6.16凹槽轮机构的连接图
注意:将表盘安装到驾驶轴上后,应在表盘上拧紧螺钉37,以使表盘和驾驶轴之间没有相对运动;同时,将凹槽轮安装到主(从属)驱动轴上后,应将拧紧螺钉37拧在驾驶轴上,以在凹槽轮和主(从属)驱动轴之间没有相对运动。
13)机架与架子的连接
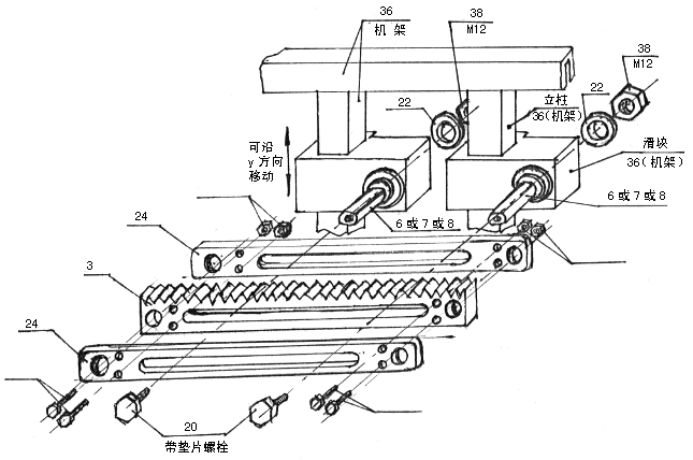
图6.17机架和机架与机架的连接图
如图所示,被连接在一起后,机架可以与框架直线移动。松开幻灯片上的六边形螺钉,滑块可以相对于色谱柱上的y方向移动(机架罩可确保齿轮的工作位置)。
14)主动滑块和线性电动机轴之间的连接
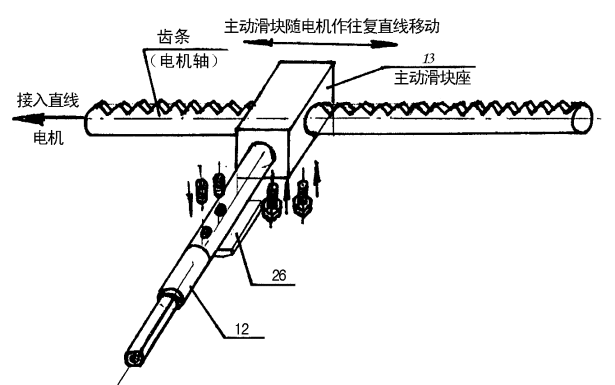
图6.18主动滑块和线性电机轴的连接图
当将滑块用作活动构件时,可以将活动滑块座牢固地连接到线性电动机轴(RACK),并且可以通过完成连接来形成活动滑块,如图所示。
V.实验内容
机构运动创新设计实验,其运动计划可以是由学生设计的,以构想一个创新思想的组织运动图的计划,并完成计划的拼接,实现发展学生创造性思维的目的。
也可以为实验选择工程机械中使用的各种平面机制,并且可以拼接和实现机理运动图。
该实验室台面提供的配件可以完成至少40个机制运动方案的剪接实验。在实验过程中,每个框架可以分为3至4名学生,并且可以完成每人不少于一种不同机构运动方案的剪接设计实验。
还可以从应用于以下工程机械的各种机制中选择实验内容以完成实验。
1。内燃机机制
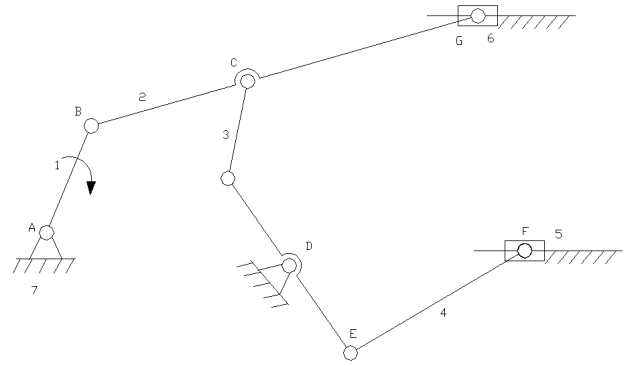
图6.19内燃机机制
机理组成:由曲柄滑块和摇杆滑块组成的机制。
工作功能:当曲柄1连续旋转时,滑块6以直线移动,而摇杆3在直线上转动以驱动滑块5,以直线移动以直线移动以进行回报。
该机制用于内燃机。滑块6在压力气体的作用下以线性往复运动(因此滑块6是实际执行器)移动,驱动曲柄1旋转并导致滑块5进行回复,以使压力气体进入滑块6的左侧和右端,通过不同的路径并实现排气。
2。精密新闻机制
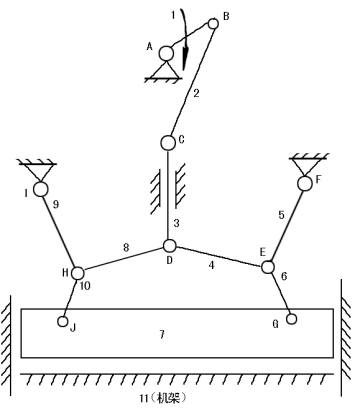
图6.20精密新闻机制
机理组成:该机制由曲柄滑块机制和两个对称摇杆滑块机制组成。对称部分由两个部分组成:杆4→5→6→7和杆8→9→10→7,其中一部分是虚拟约束。
工作特征:曲柄1连续旋转时,滑块3上下移动,滑块7通过杆4→5→6上下移动以完成材料的压缩。对称零件8→9→10→7的功能是平滑地向下压下组件7并平衡材料的负载。

用途:该机制可用于通过使用钢板打包机,纸板打包机,棉制冰船,剪切机来完成预期的工作。
3。

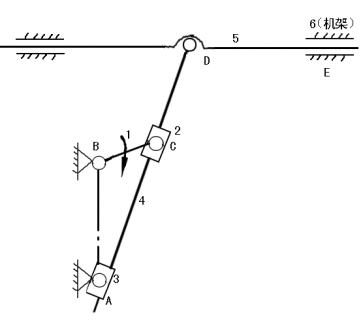
图6.21 Niutou Planer机制
机械组成:牛头刨机机制由摇摆导杆机构和双滑块机制组成。但是,在图A)中,成员2、3和4形成两个移动对,沿相同的方向移动,组件3和其他组件形成了两次移动对;图b)移动图a)中的点d滑块以指向A,因此移动对位于框的底部,易于润滑,减少移动对的摩擦损失,并提高机制的工作性能。图a)和图b)中所示的机制的运动特征完全相同。
工作特性:曲柄1旋转时,导杆3在点A周围摆动,并具有快速往复的特性,使杆5完成了往复式线性运动,并且具有缓慢工作的中风和快速不工作的中风的特征。
4。两个齿轮曲柄摇杆机构
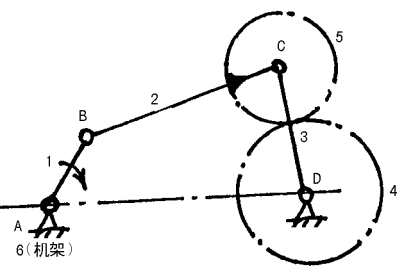
图6.22齿轮摇动摇杆机制
机理组成:该机制由曲柄摇杆机制和齿轮机理组成,其中齿轮5与摇杆2形成刚性耦合。
工作功能:曲柄1旋转时,连杆2将摇杆3驱动到摇摆,因此齿轮4被驱动以旋转齿轮5和齿轮4的缝隙。由于摇杆3换回去,因此实现了齿轮4的往复式旋转。
5。两个齿轮曲柄机制
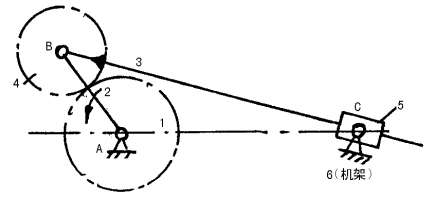
图6.23齿轮框架机制
机理组成:该机制由齿轮机理和曲柄块机理组成。齿轮1和杆2相对旋转,而齿轮4则安装在铰链点B上,并与导杆3牢固地连接。
工作特征:杆2以圆形运动移动,使曲柄通过连杆旋转,使摇摆的块通过连杆旋转,从而改变了连杆的姿势,因此齿轮4驱动齿轮1驱动齿轮以相同的方向旋转并相对于曲柄旋转并反向旋转。
6。空中喷气织机开口机构
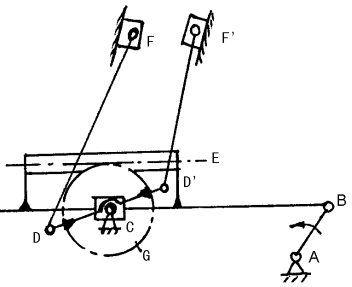
图6.24气喷射织机开口机构
机理组成:该机构由曲柄块机构,齿轮机构和摇杆滑动机构组成,其中架子与导杆BC牢固地连接,并且摇杆DD'与齿轮G。
工作特征:曲柄AB以相等的角速度旋转,驱动导杆BC在与秋千块摆动时相对于摆动块移动。固定安装在导杆BC上的机架E与轴上lim的齿轮G固定在轴上,使齿轮G以较大的角度摆动,并且与齿轮G相应的杆DD'相应地移动,并且滑块通过连接杆DF(D'F')上下移动。在合并的机理中,机架E的运动是通过运动和旋转合成的复合运动,而齿轮G的运动取决于这两个运动的综合。
7。双滑块机制
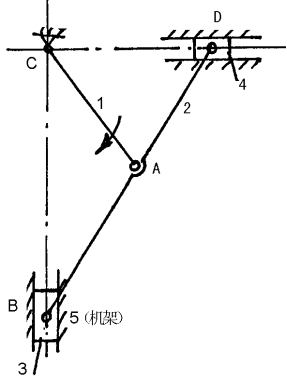
图6.25双滑块机制
机械组成:该机制由双滑块组成,可以将其视为曲柄滑块机制ABC,因此滑块4被视为虚拟约束。
工作特征:曲柄1以恒定速度旋转时,滑块3和4以直线移动,同时在杆2上移动。
应用示例:椭圆画家和剑杆织机纬线指南机制。
8。冲压机制
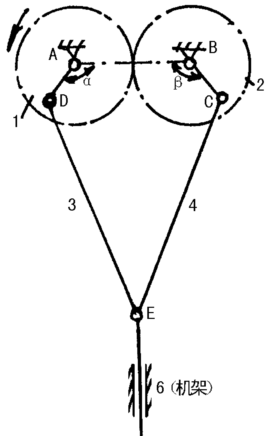
图6.26冲压机制
机理组成:该机制由齿轮机理和两组曲柄滑块对称地排列。广告杆与齿轮1紧密连接,BC杆与齿轮2牢固地连接。
组成要求:Z1 = Z2; ad = bc; α=β
工作功能:齿轮1以恒定的速度旋转,驱动齿轮2旋转,以便通过连杆3和4驱动杆的线性运动完成预定的功能,5上下。
该机理可以卸下杆5,并且点E的运动轨迹保持不变,因此该机理可以在自动机械中使用,在该机械中,由于空间限制,无法放置斜槽,但必须获得线性进料。此外,对称布置的曲柄滑块机制可以使滑块在压力状态下移动良好。
应用:该机制可用于冲压机,空气泵和自动馈线。
9。插入机制
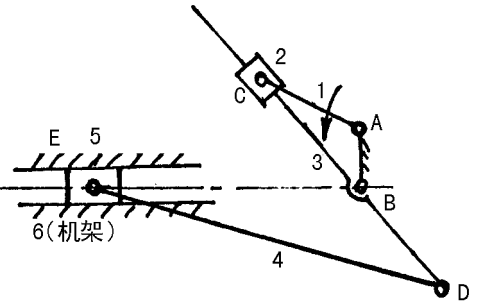
图6.27插入机制
机理组成:该机制由旋转的导杆机理和向前的曲柄滑块机制组成。
工作功能:曲柄1以恒定的速度旋转,并且驱动的杆3被驱动以围绕点B旋转通过滑块2旋转,而滑块5被驱动以直线穿过连接杆4的直线移动。由于曲柄1的相应角度对应于导杆机构的相应角度,使Slider 5驱动Slider 5驱动Slider 5,以换档5,因此具有快速返回的特征。
应用:此机制可用于诸如刨床和插件之类的机械中。
10。筛选机制:
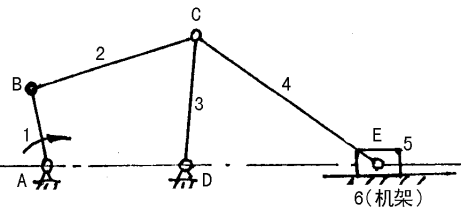
图6.28筛选机制
机理组成:该机制由曲柄摇杆机制和摇杆滑块机制组成。
工作特征:曲柄1以恒定的速度旋转,滑块5被驱动以通过摇杆3和连接杆4的线性运动进行互助。由于曲柄摇杆机构的突然返回性质,滑块5的速度和加速度大大变化,从而更好地完成了筛选工作。
11。凸轮链接组装机制
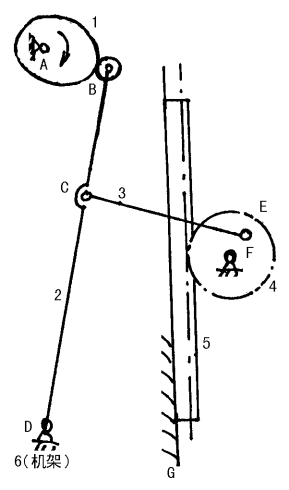
图6.29 CAM链接组合机制
机理组成:该机制由凸轮机构,曲柄连杆机构以及机架和机架机理组成,曲柄EF和齿轮是坚固的连接构件。
工作功能:凸轮是以恒定速度旋转的驾驶员。齿轮4旋转穿过摇杆2和连杆3,架子5线性地通过齿轮4和架子5的网络旋转。由于凸轮轮廓曲线和卒中限制和每个杆构件的尺寸约束,齿轮4的尺寸约束,因此机架5只能旋转,以使架子5在截止线上移动。
应用:该机制用于梳羊毛机器的钢领运动的传输机理。
12。凸轮五链接机制
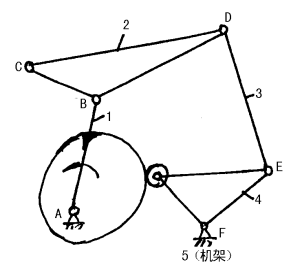
图6.30 cam-five链接机制
机理组成:该机制由凸轮机理和连杆机理组成,其中凸轮与活性曲柄1牢固地连接,并与摇杆4形成高对配对。
工作功能:CAM 1以恒定的速度旋转,并且该运动通过杆1和杆3传输到杆2,因此杆2的运动是两个运动的合成运动,因此连接杆2上的C点可以实现给定的运动轨迹。
13。行程放大机制

图6.31行程扩大机制
机构组成:该机制由曲柄滑块机构和机架和机架机构组成,其中架子5作为框架固定,齿轮4是移动的零件。
工作功能:曲柄1以恒定的速度旋转,连杆上的点C线线性移动,齿轮3驱动机架4以线性移动。机架4的移动行程是点C点的两倍,因此是中风扩增机制。
注意:如果是偏置曲柄滑块,则架子4具有突然返回的特性。
14。冲压机制
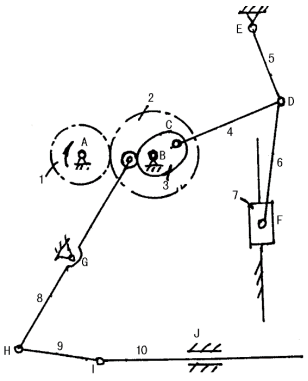
图6.32冲压机制
组成:该机制由齿轮机构,凸轮机构和连杆机构组成,其中凸轮3与齿轮2紧密连接。
工作功能:齿轮1以恒定的速度旋转,齿轮2驱动与其连接的凸轮3一起旋转,滑块7和滑块10以直线向连接杆机构移动,滑块7完成了冲压运动,滑块10完成了进料运动。
该机制可用于连续自动冲压机床或剪切床(剪切床由滑块7作为剪切工具制成)。
15。双摆杆挥杆角度扩大机构
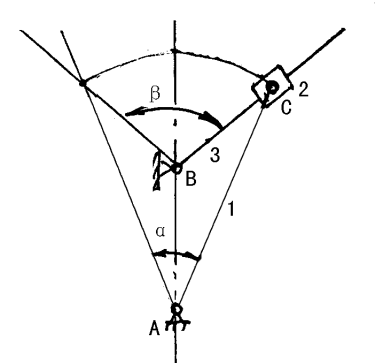
图6.33双摆杆挥杆角度扩大机构
机械组成:由摇摆导杆机构组成,并具有L1>实验室(AC> AB)。
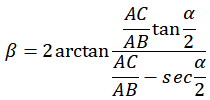
工作特征:当活跃的摇杆1旋转时,驱动杆3的挥杆角为β,并且有β>α,可以实现挥杆角度增大。每个参数之间的关系是:
6。机构创新设计方案的实验报告
绘制实际组装机制机理运动的示意图,并标记示意图中测得的机理运动学尺寸。
绘制实际装配机构的极点拆分的简短图表,并简要说明杆组拆分的原因。
根据杆组的说法,您以不同的方式分裂并组装了杆组,机理运动计划的可能组合是什么?需要使用机理运动的示意图,并简要解释每种机制的运动传递状态,并比较运动学性能。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.gzcsqcyx.com/html/tiyuwenda/7447.html